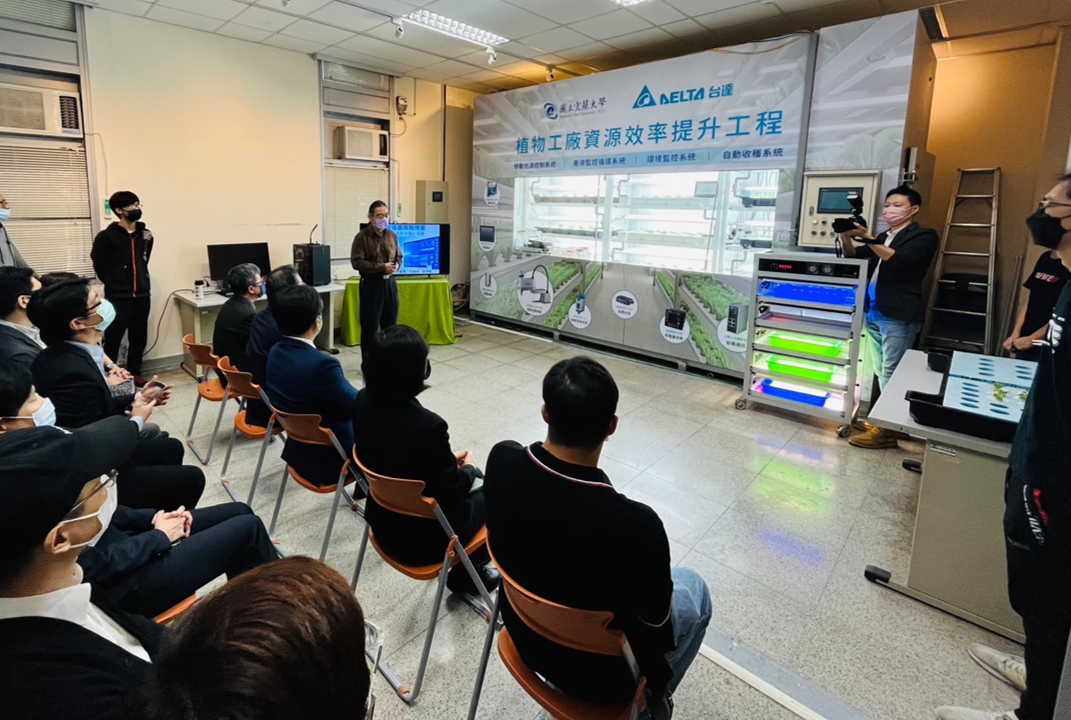
田間機器人 & TEL 東京威力科創機器人大賽 (2021)
參與田間機器人的開發,讓我完整經歷了從 0 到 1 的建構過程,並藉此精進 3D 建模機構設計與材料選用的實務經驗。 在系統整合方面,透過電控設備間的通訊協定整合多種感測器,熟練掌握工業繪圖軟體(AutoDesk CAD、Inventor)與動畫軟體(3DS MAX)的應用, 並深入學習單晶片控制(Arduino、OpenMV)和微電腦控制(Raspberry Pi4)。在這個階段,我不僅入門了控制、通訊與運動控制相關技術,更累積了系統架構思維與設備整合能力。 雖然最終止步於決賽圈,但這段「從無到有」的摸索過程,確實為我日後開發複雜機器人系統奠定了基本的技術基礎。
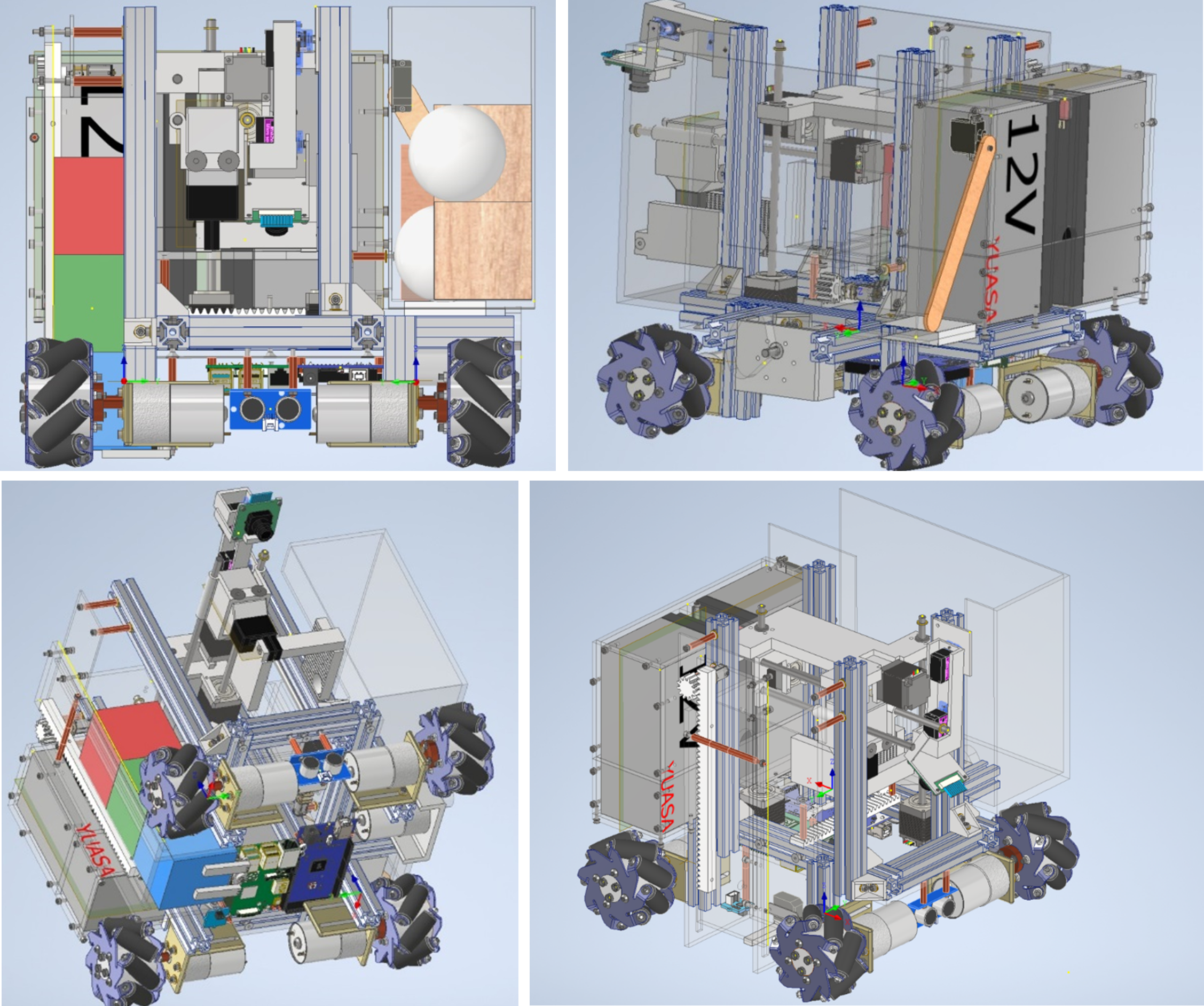
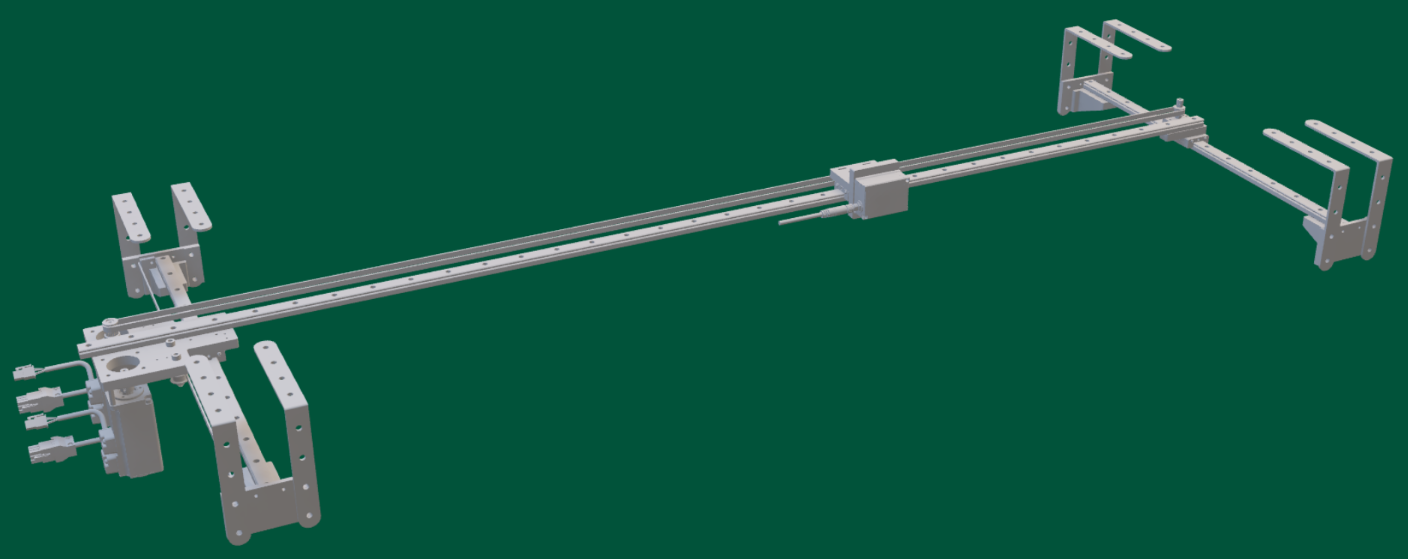
▲ 東京威力機器人3D示意圖
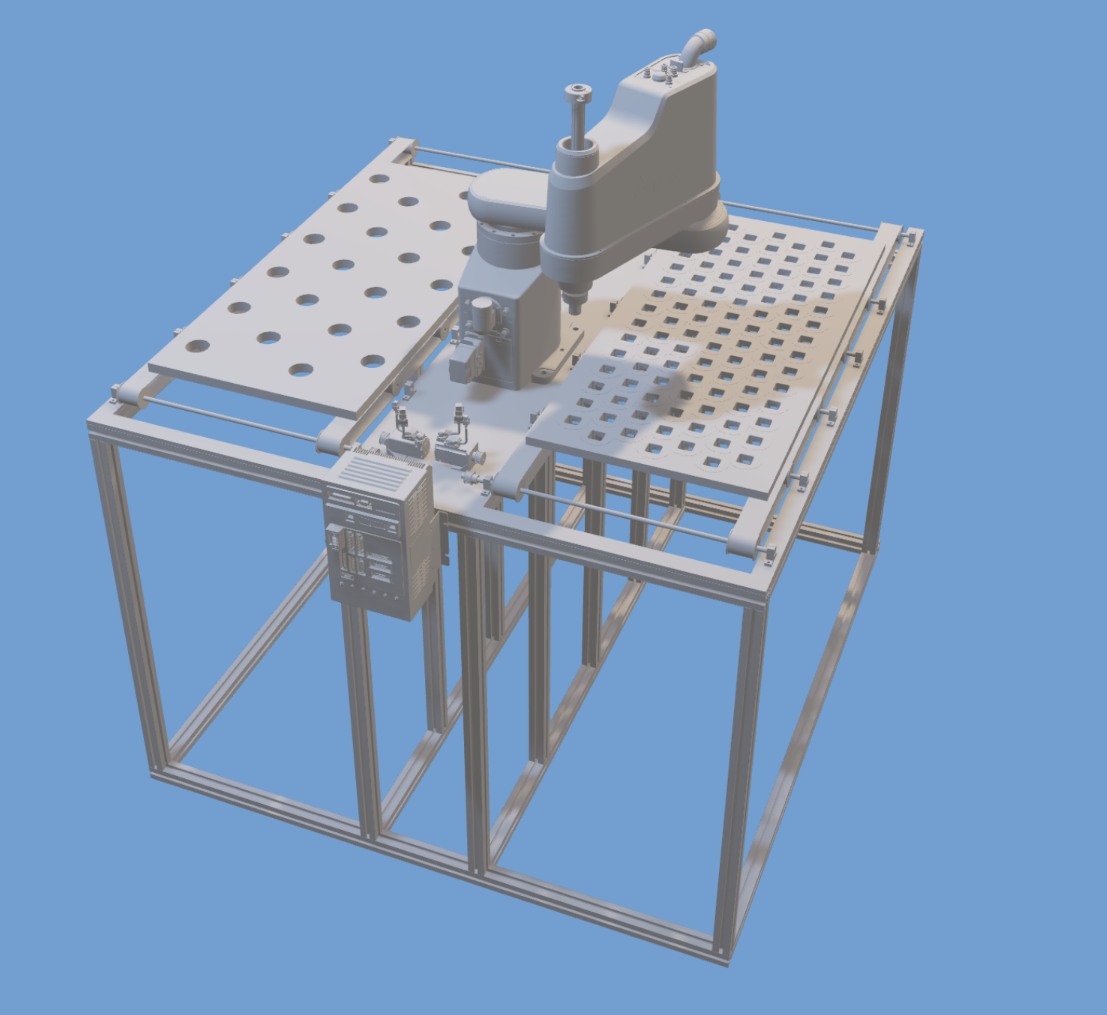
▲ 3DS模擬概念圖
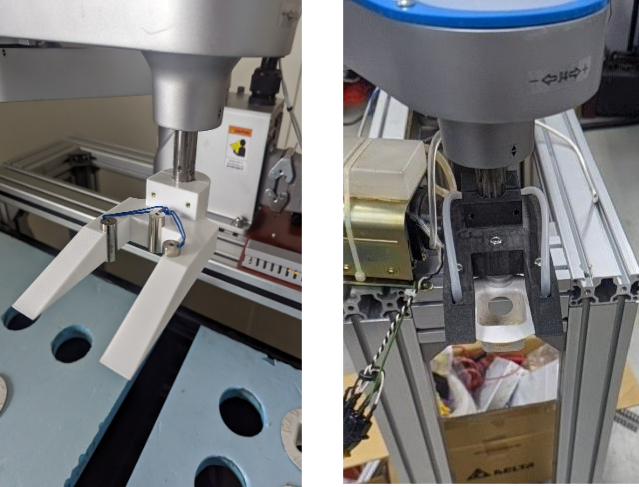
雖然這時的繪圖以及設計基本概念還不完全,但能夠使用工業繪圖軟體將想像以圖像以及動畫的方式做呈現,降低跨領域溝通的門檻與開發初期的試錯成本。
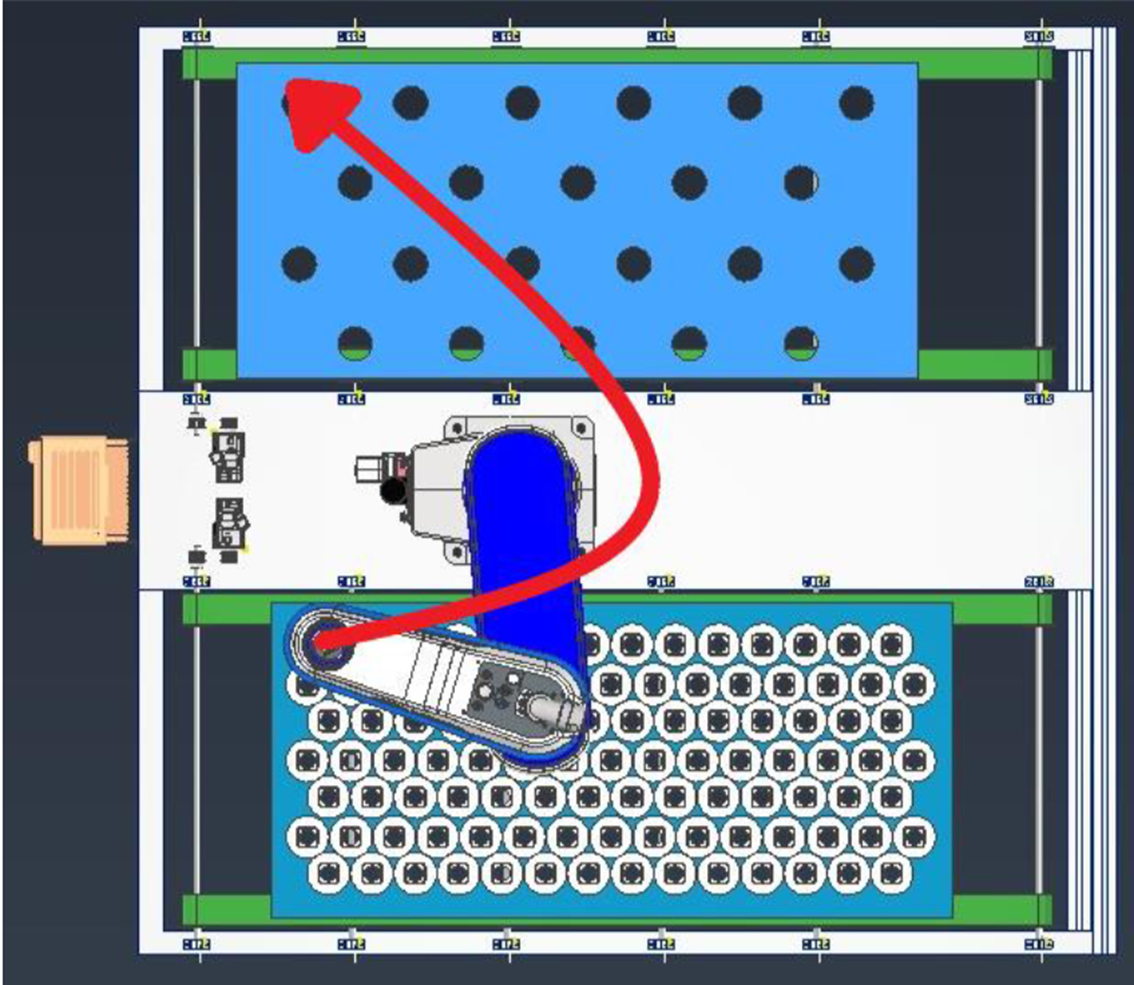
透過視覺化的模擬,我能更直觀地向團隊展示機構運作邏輯,並在實作前預先修正潛在的干涉問題。這份從數位設計到實體產出的轉化經驗,
不僅累積了系統架構思維,並對未來整合平飼機器人系統整合時,能夠清楚了解部份設備的選擇與加快研發的進度。

❮
❯





.jpg)